The Openaccess 3.0 shield is kinda old, but it’s actually pretty good. I have quite a bit of experience using it so I think I’ll talk about some of the oddities in it here today. I’m going to start with a silkscreen nit pick and segway into some other things. You may think I spelled ‘segue’ wrong, but what you can’t see is that I’m balanced on two wheels right now.

Incorrect placement
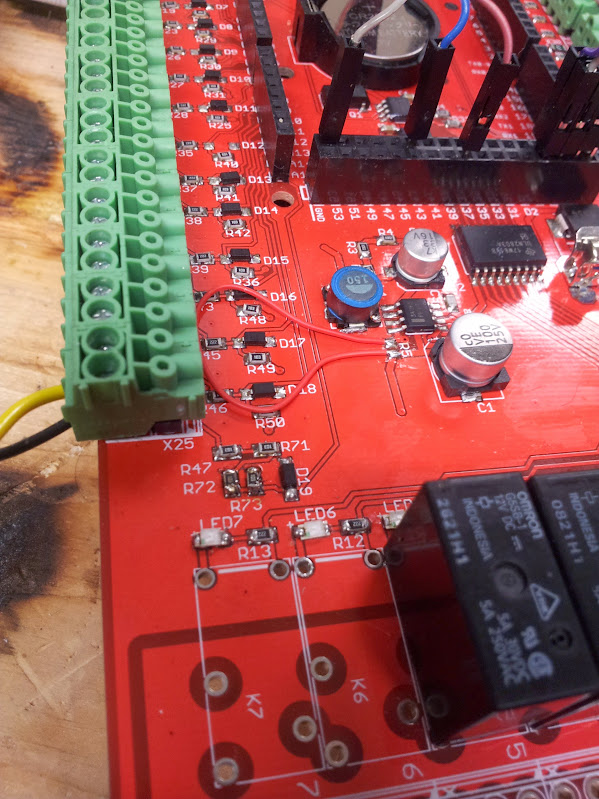
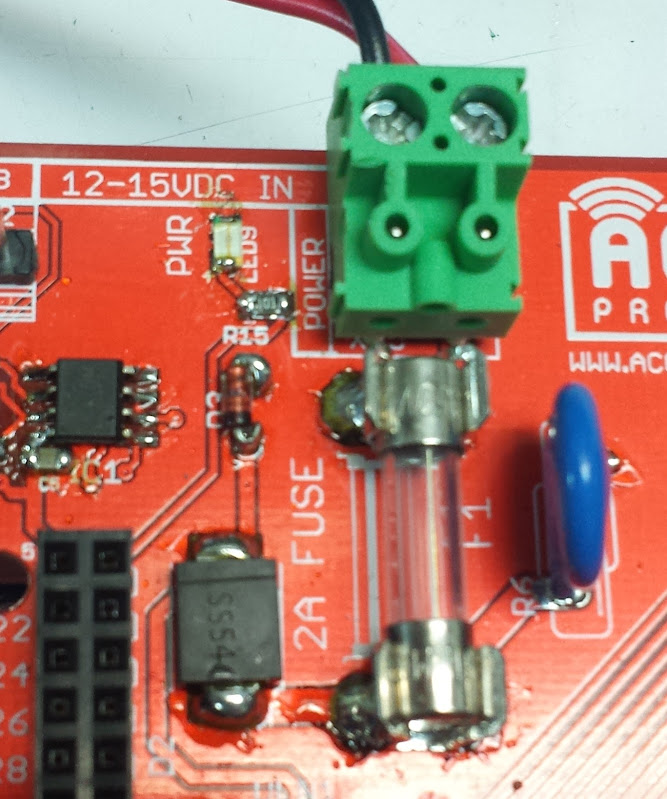
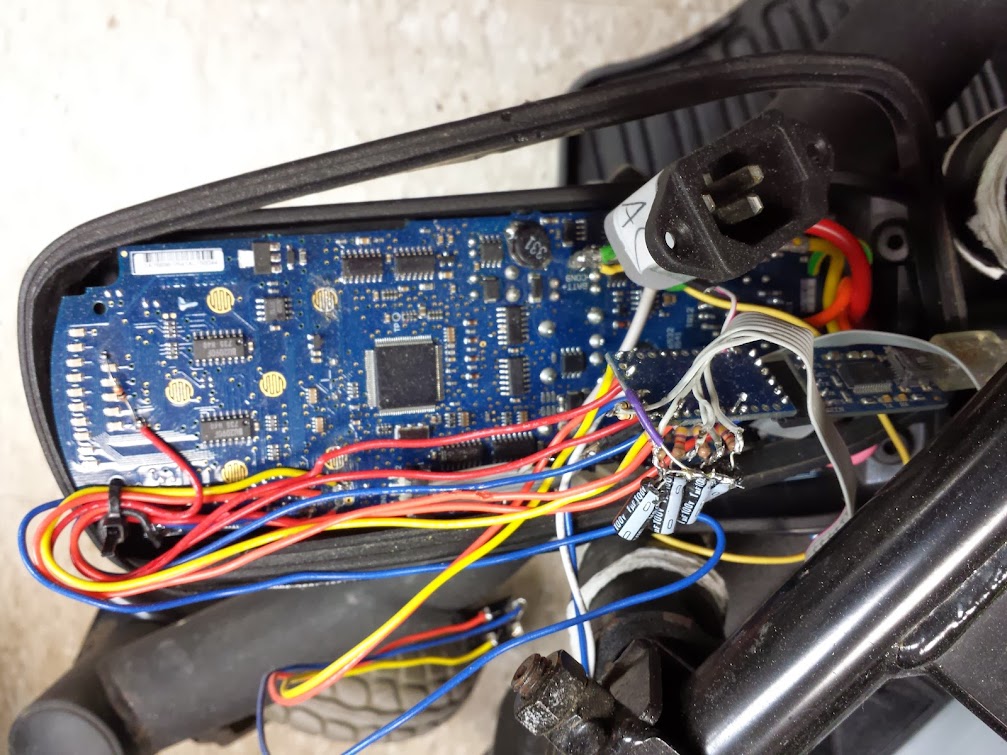
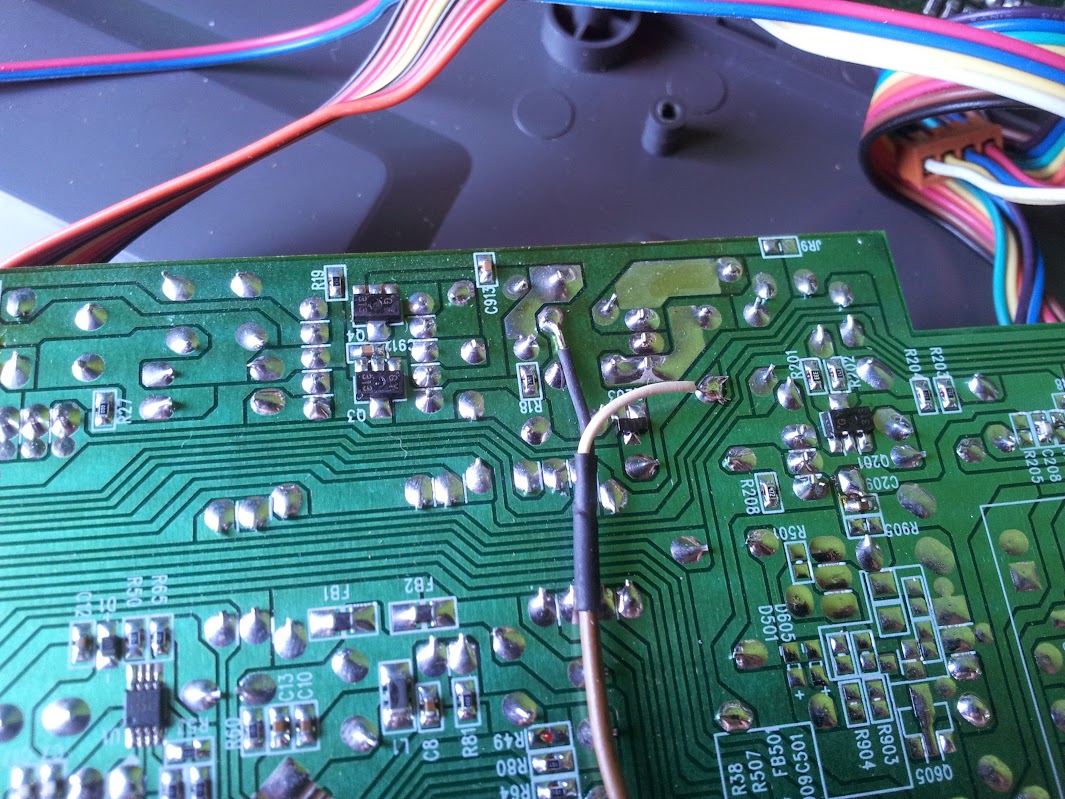
Ignoring, for the moment, the unpopulated relays and screw terminals take a look at R47, 71, 72, and 73. Those all appear correct and well tacked down. I will also not that nowhere on this board do silkscreen deliniators for components reside at a 90* angle from the components themselves. Nowhere except here. The yellow and black wires connect to the battery voltage input of this board. The entire row there is for alarm sensors (which also go into analog pins) but the last one is set up with a voltage divider so it can be connected to the battery the OpenAccess runs on (if you run it off a battery that is). For the longest time I couldn’t make the simplest part of this board work, the battery sensor. Eventually I traced the circuit to see that it didn’t do anything. Checking the board layout (which isn’t provided in pdf or anything so you need eagle to read it) I found that two of those resistors were in sideways.
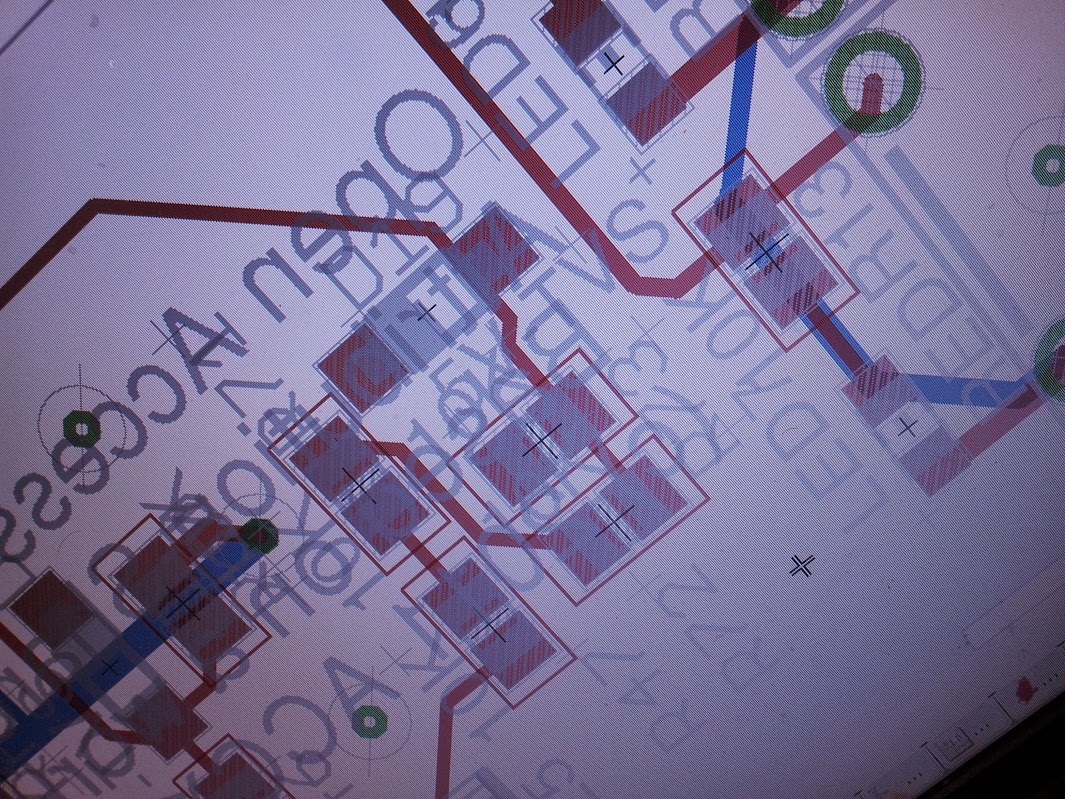
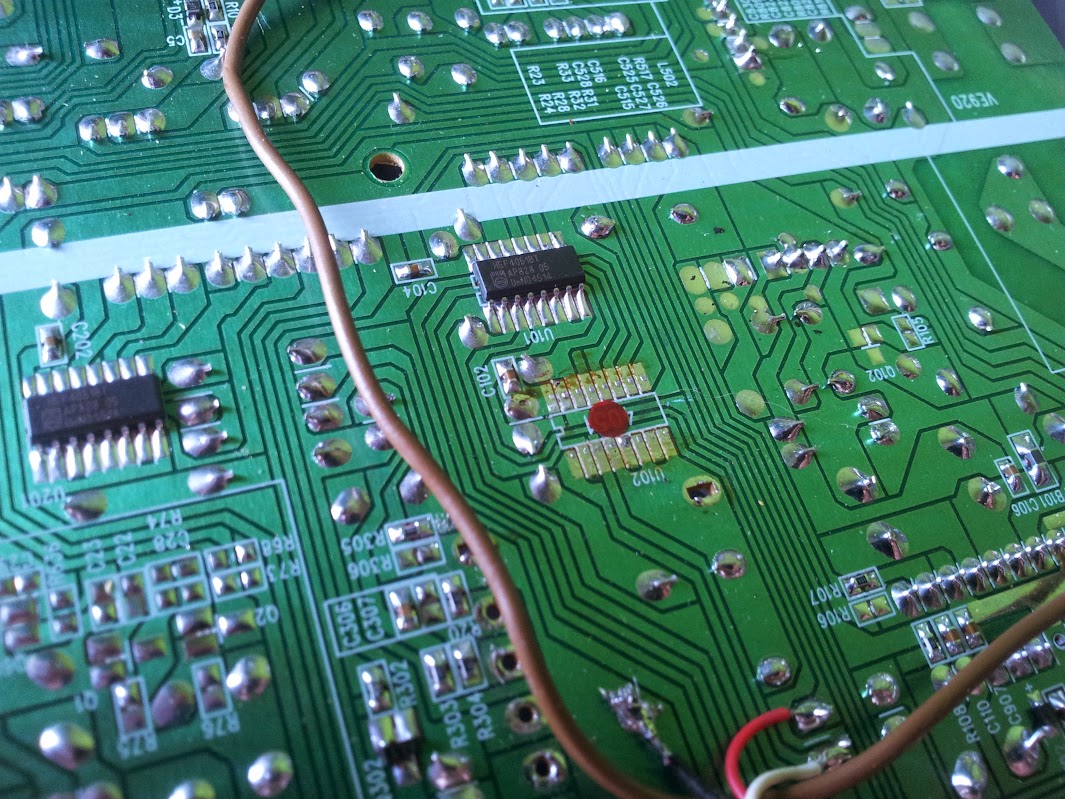
I stand by how I assembled that board and will insist that the error lies with the board design. With that identified and repaired I finally got a good read!
There, now it reads correctly. The only thing is there’s no reason I can tell to have that separate from the input voltage. This has a nice switching regulator onboard and runs happily right on lead acid batteries. I decided to jumper the input to the voltage divider so that I could read the voltage that was feeding the board power.
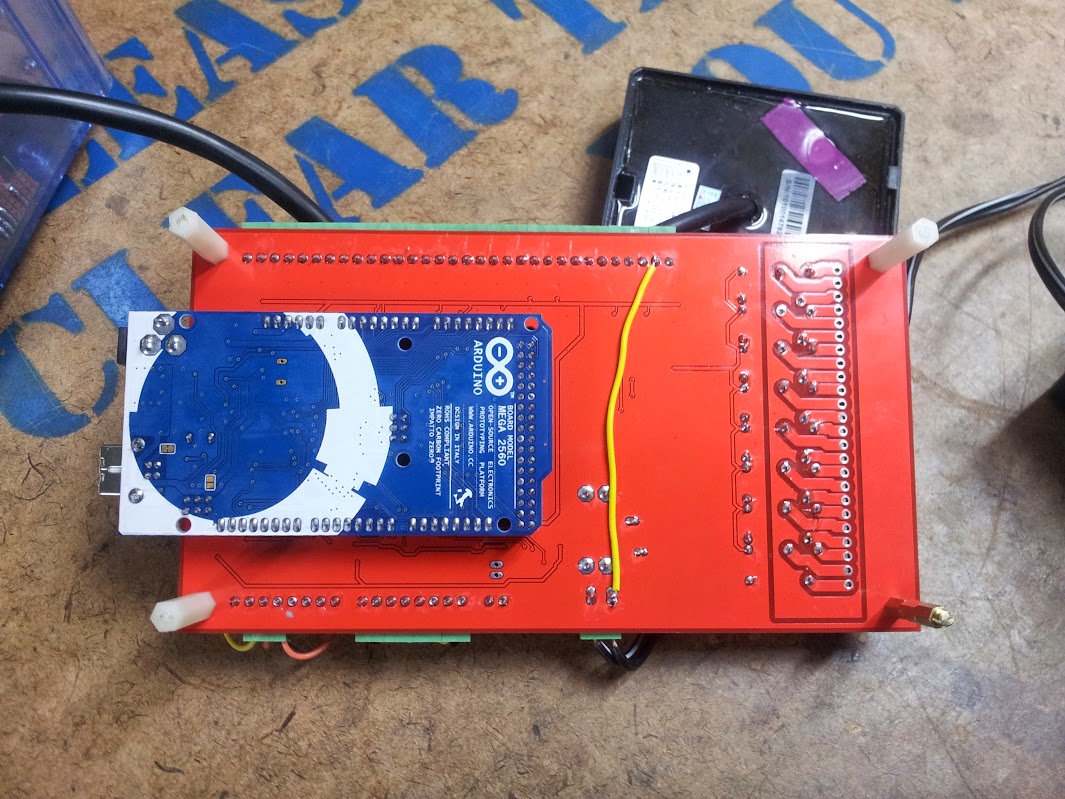
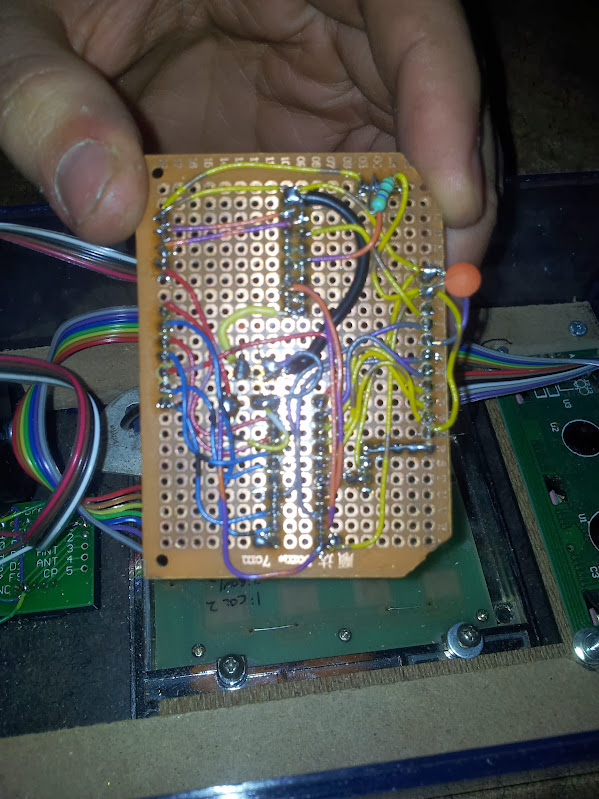
The further modifications I made are these:

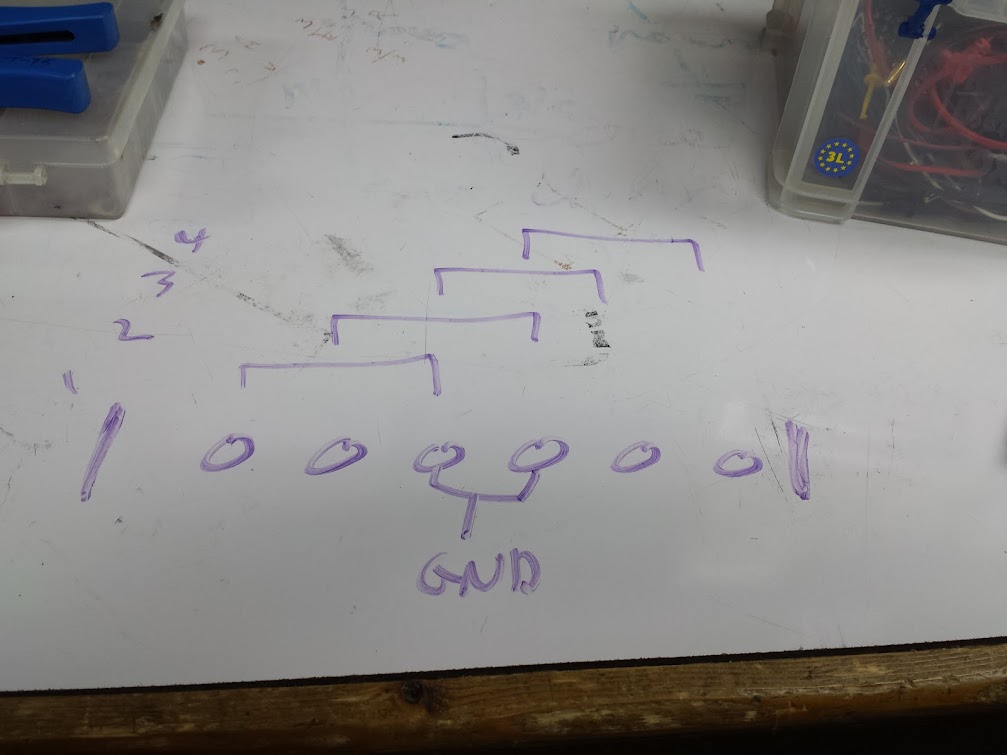
pass-through to use the protection circuit through the unified cable that goes to the front panel

Parallel port on the right, level shifter in red goes to the tiny 0.1″ screw terminals for 3.3v serial (skipping the usb/serial converter), and the screw terminals for the exit button

The cable for the dot matrix printer (both polarity by mistake)

The round cable goes to the front panel, the B-wire goes to a beagle bone for network connection and control
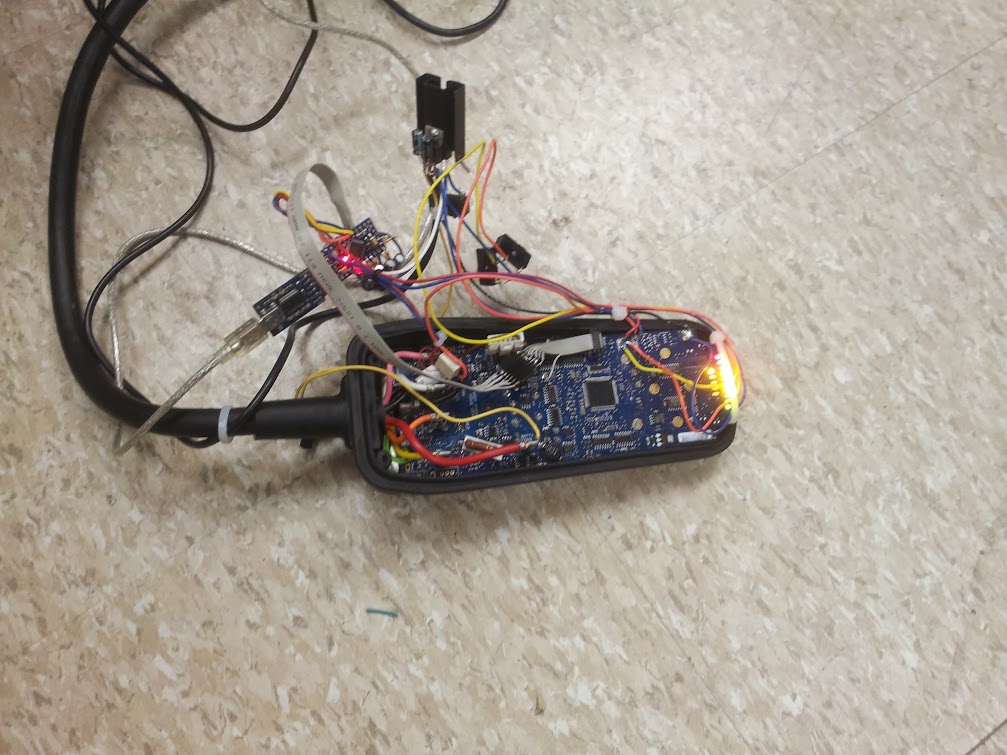
That covers the modifications I made to the board. Let’s go over the rest of the hardware:

Reset button and header for the same

i2c rtc and eeprom circuit (big ol’ eeprom too)

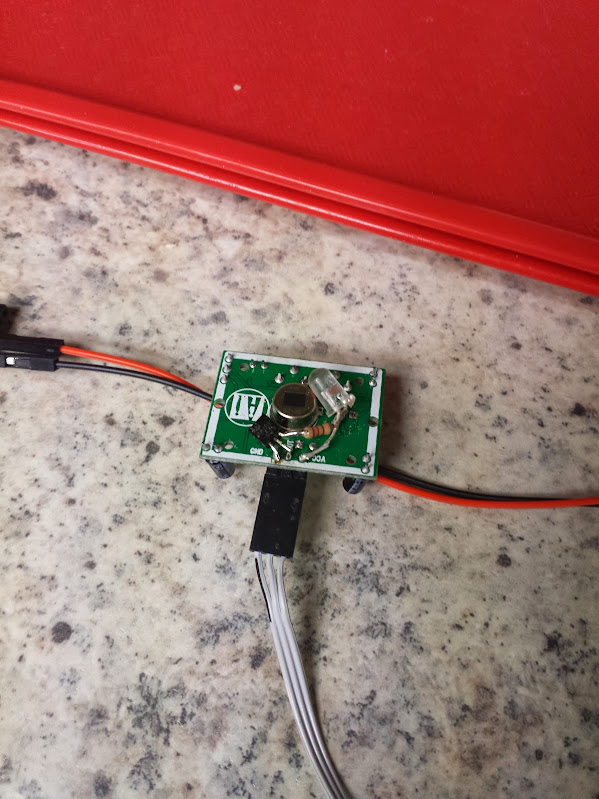
voltage divider and zener diode on each alarm sensor pin

This is the protection for the wiegand readers, resistor dividers and zener diodes

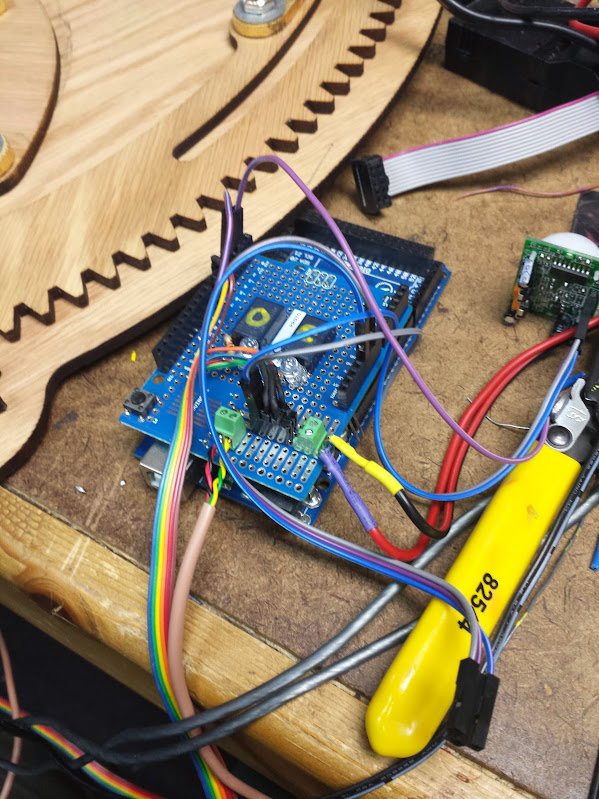
This is the rs485 circuit, jp1 connects the input to the output through a resistor

Here is our switching regulator, that big resistor is the current sense one of a very small rating

This is the relay driving circuit, it goes through a buffer/driver and has individual LEDs
So, admittedly this is heavy on pictures and light on explanation. Most of the explanation will be in the article that describes the code. At some point I’ll tie all these articles together.




























{kind=link}