
original glory
Sun Microsystems used to be one of the makers of very pretty hardware (if you like the color purple), but that era is no more. Sun rays in particular are cool though. The ability to move your desktop with your smart card to any terminal you want is awesome and really, the hardware is really well built. Also, Oracle sucks. Combine these two and you have no new hardware or support for a modern ecosystem of sun terminals. I have tried and failed multiple times to get sun ray servers working and I give up. I decided to make a decent tiny little thinclient/monitor out of my only LCD sun ray.

custom wiring
The first thought was to just have a pi contained inside it, but it became obvious that I was going to break out other ports from the generic LCD controller. Doing that and not having HDMI would be annoying, so I added an HDMI switch to the deal. This did not add much complexity, but it gave me more buttons to put on the front panel. I decided to use the audio jack holes for the power button to the LCD controller and the input switch button for the hdmi switch, leaving one free to house an RGB LED that could represent which of the three inputs was active. The power LED for the LCD controller went where the original one did, and the IR receiver went in the corner of the smart card hole.

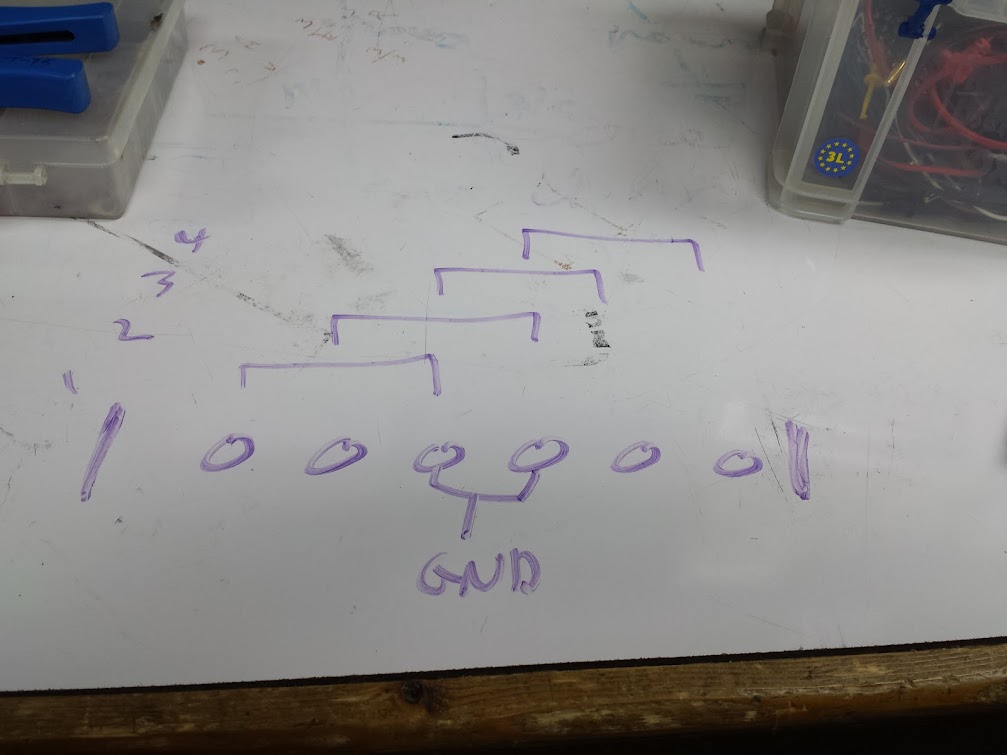
NEVER trust the silkscreen of the button functions on cheap controllers
It turns out the bulkhead mount HDMI cables I bought have almost the same spacing for screw holes as the VGA ports the sun ray originally had. I cut and mangled most of the case to fit the new contents and decided to mount as much of it to the LCD as possible so the clamshell could be opened for service. I also added the 2 composite ports out the original serial port holes as they fit snugly there.

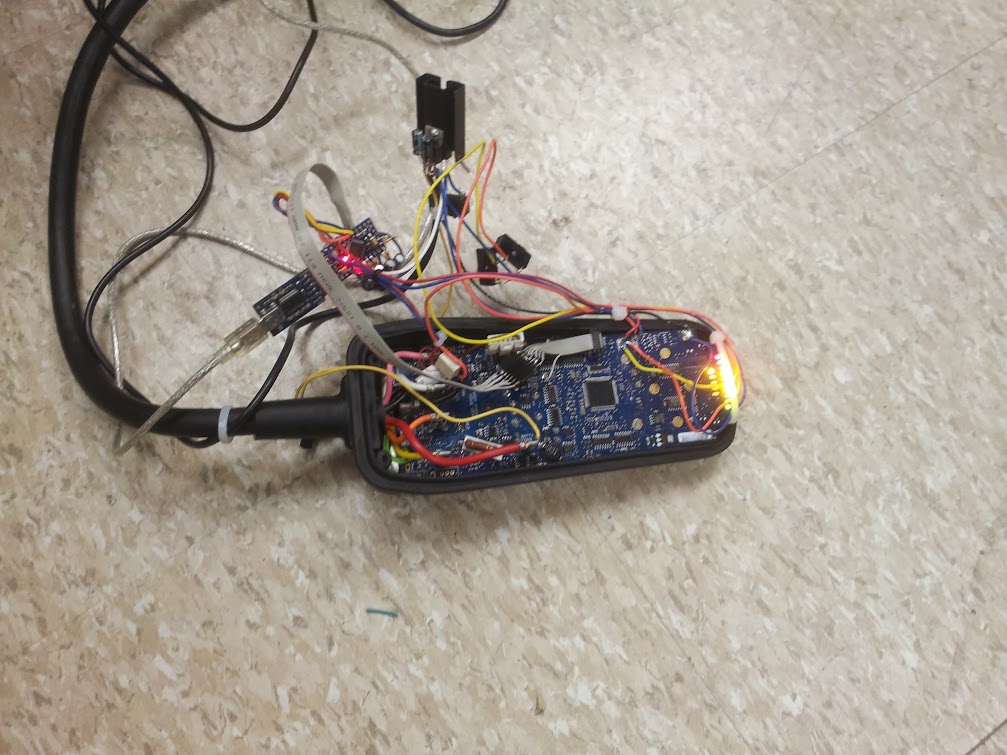
first constraint
The backlight driver went in first, it couldn’t move very far but I put it as far out as I could to leave room for the rest. Then went the insulating layer (cardboard) and the LCD controller. With that in and the video cable routed the PI and power supply for it went in easily. The only hard one was the HDMI switch as it had ports out all four sides and there wasn’t enough space to glue it down anywhere. After some fiddling it all fit, but I had to add a power switch for the PI because it didn’t like to come up if powered on with the monitor. This power switch went in the SIM card port that this had for some unknown reason.

all laid out and shimmed with corrugated dead tree
This HDMI switch is actually really cool. You can only switch between inputs that have signal, and it auto-switches when one comes online. I’d recommend it for being cheap and useful.

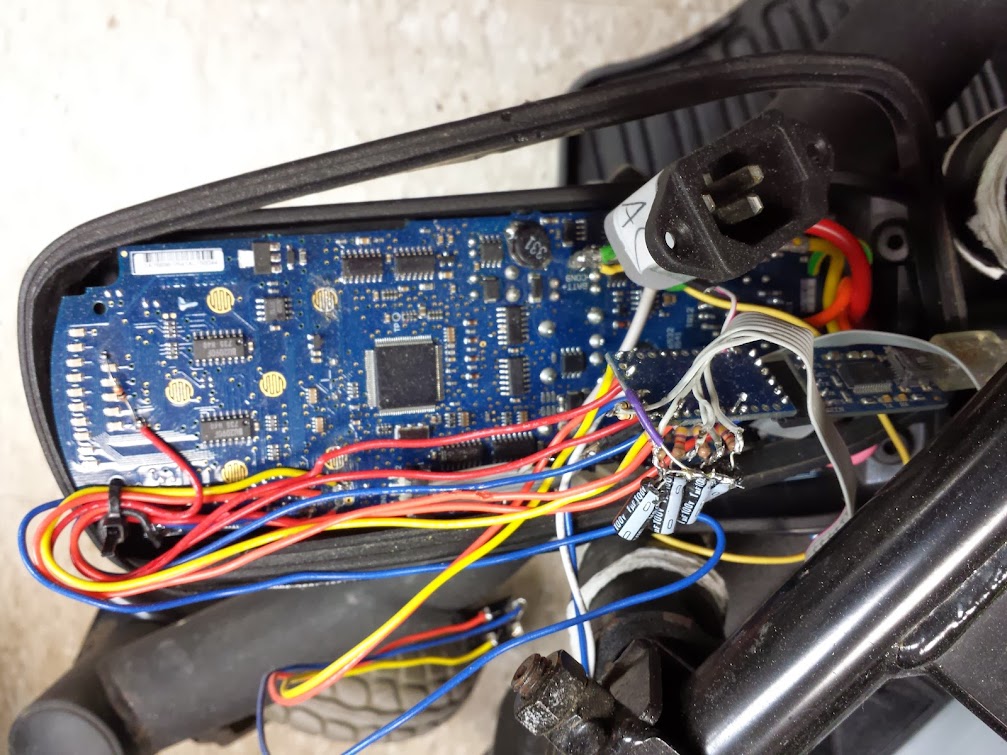
sandwiched between insulating cardboard
This is now 100% more useful to me, it’s a wireless linux box that’s got a built in monitor for working on my single board computers. I can download and write images right from the second input of the monitor. If I had decided to spend more time at it I would have lined up the original ports with the USB, ethernet, and other jacks so it looked more stock. I could have tried harder to get internal sound working on it. I could have broken out the pi’s gpio to the slot where the smart card went. This was already a dubiously useful mod for me, and while all those things would have been cool, I really wouldn’t have found them much more useful.

hacked
All of the pictures of this build are here.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}